簡介:
由於傳統的螺旋槳推進方式有離心力過大、易產生空蝕現象以及在低雷諾數下機動性低問題,撲翼推進便是在這種情況下的另一種選項。由於撲翼的流場情況與傳統流場不同,因此也無法用傳統飛行器的方式來分析升力、推力與阻力的產生機制。
在撲翼中,撲翼的性能受許多機制影響,包括運動模式(拍打頻率、速度、振幅及機翼旋轉)和翅膀形狀、翅膀結構等,都會影響流場的情況。可見撲翼的流場分析相較下比傳統飛行機制複雜更多,為了達到撲翼的最大性能,以上機制值得深入研究探討。
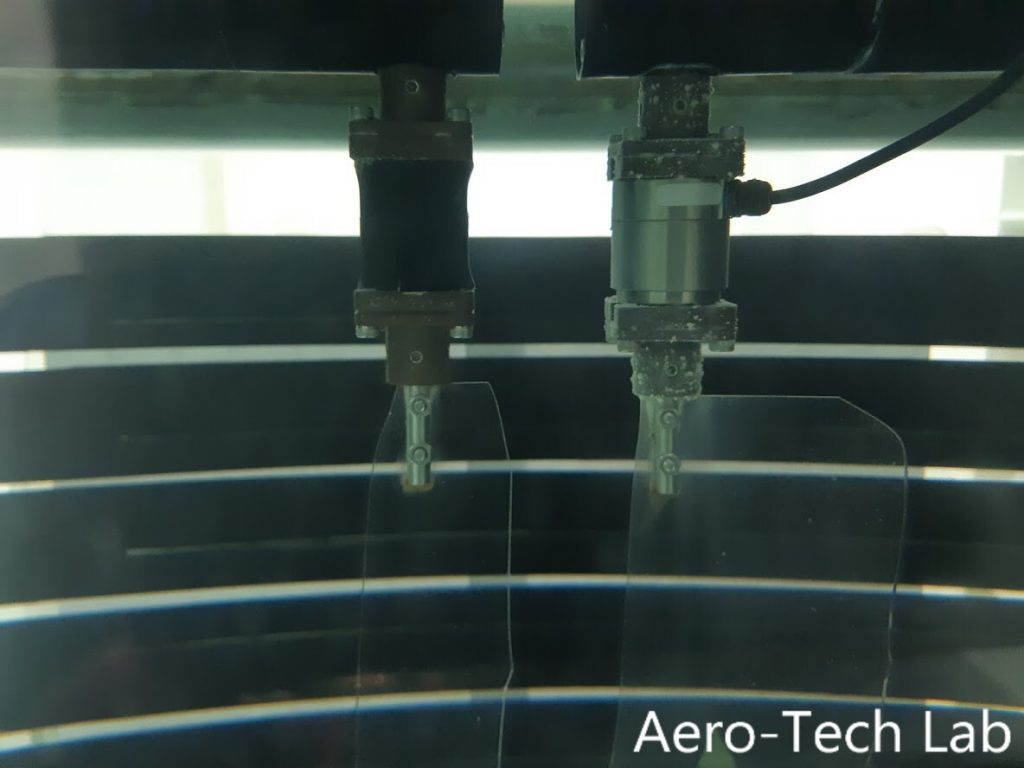
實驗裝置
本實驗主要利用本實驗室所擁有的水洞進行實驗。 一套三維串聯撲翼實驗測量裝置在水洞上,裝置中的兩個前後翼可以獨立地執行動作。撲動機構也具有能自由改變兩個翼之間的距離及其形狀和尺寸的設計。撲動機構允許原位測量由兩撲翼產生的流 體動力學升力和推力。為了完成這一流體 – 結構相互作用問題的分析,將通過粒子圖像測速(PIV)獲得周圍的流場信息,如速度場和渦度分佈。
PIV系統可分為三部分來做介紹。
第一部分為加入粒子,將密度與水類似的粒子放入水洞中,隨著水流流動,使得整個流場充滿著粒子。
第二部分為雷射架設,架設一台2W的綠光雷射,並照射兩條黑線之間狹縫製造片狀雷射進行實驗。
第三部分為記錄結果,利用高速相機拍攝反光的流場,並進行後續分析。
1. 粒子
2. 雷射
3. 高速照相機- FASTCAM Mini UX50
4. 力/力矩感測器
實驗成果
實驗上,為了獲得撲翼周圍的流場情形,利用PIV技術,先將粒子浸入流場並隨之移動,再利用雷射打進流場,使得粒子反光,設置雙快門相機同步拍攝,最後再由軟體處理以獲得流場。
未來展望(應用)
透過感測器及PIV技術,觀察撲翼的流場情形,分析升力、推力、阻力,進而了解撲翼的飛行機制,對於未來將會發展的撲翼微型飛行器,提供很好的理論依據。